位置精度の高度化はロボット制御の要
産業用ロボットが日本で初めて登場したのが1969年。半世紀以上経った2022年の今ではロボットと人が共存し始める協働ロボットの導入も定着し、その活躍の場は製造工場を主とした従来の産業用ロボットのフィールドのみならず、農業、飲食業といった分野へと広範囲に及んでいます。
ロボット制御の重要な技術の一つである位置検出。その精度を高めてきた開発者の不断の努力が今のロボット、自働機械の活動領域を広げています。ロボットが動く、止まるをより正確に動作することで、生産効率を各段に高めることはもとより、これまで出来なかった微細な作業も可能となります。位置精度の高度化はロボット、半導体製造装置などの制御装置の向上、ヒトとロボットとの協働には欠かすことのできないテーマの一つです。
産業用位置検出センサエンコーダ
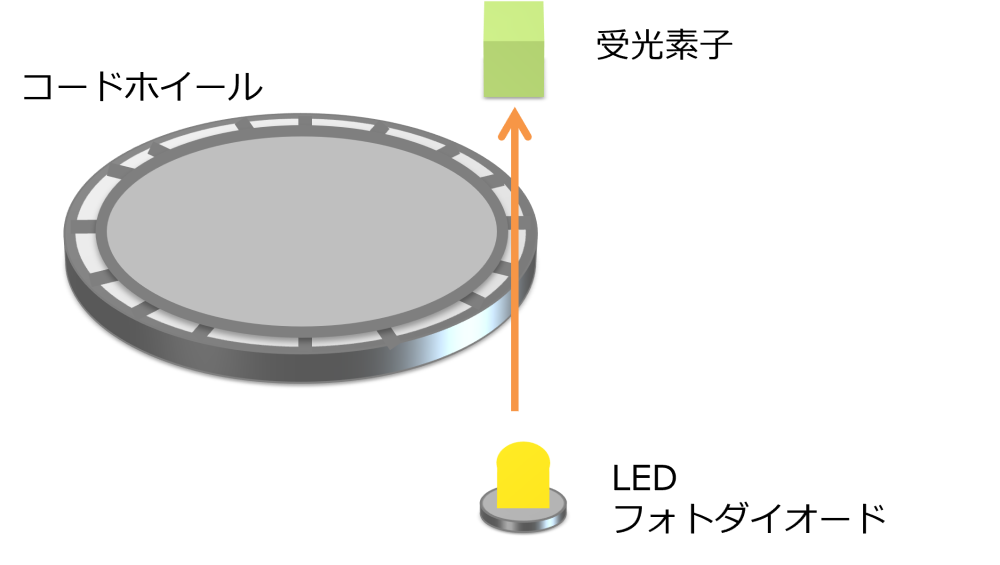
光学式ロータリーエンコーダ
サーボモーターの位置検出に使用されます。インクリメンタル型とアブソリュート型と2種類の方式があります。より精度の高い動作を求めるケースでは、絶対位置検出を信号に変えるアブソリュート型の使用が一般的です。エンコーダの内部にはLED、レーザーダイオードなどの発光素子や、受動素子と発光素子との間にコードホイールが組み込まれています。コードホイールに形成されたスリットを光パルス信号が通過することで位置検出をします。
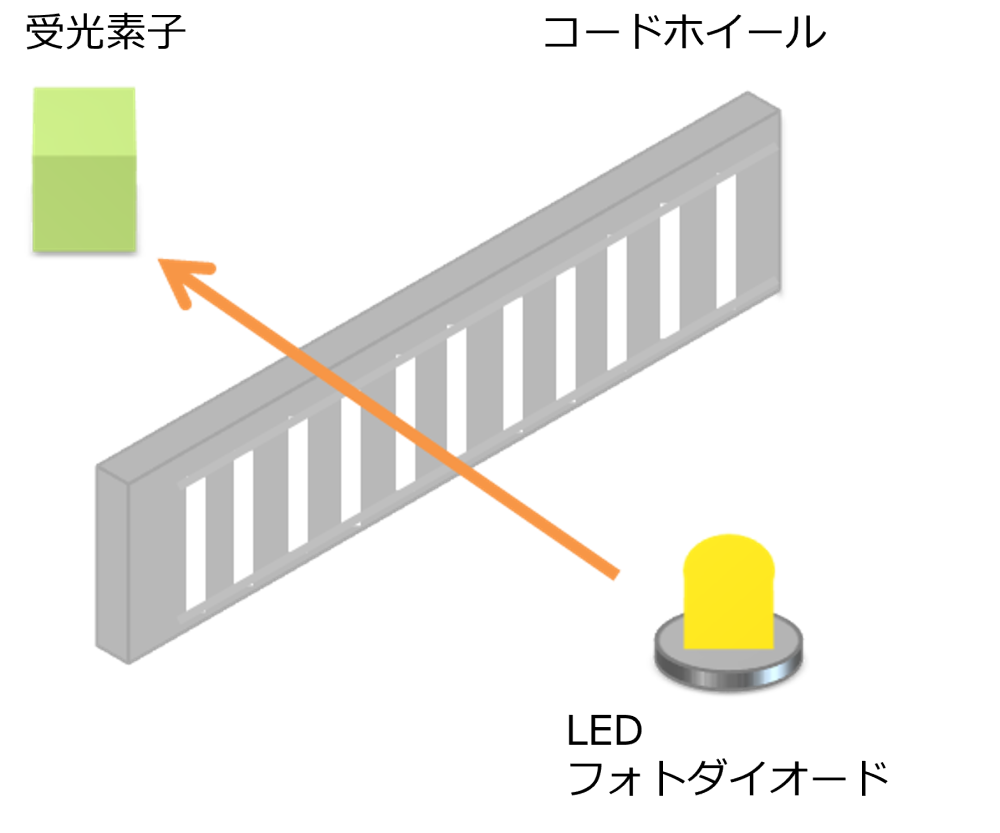
リニアスケール
光学式ロータリーエンコーダと同じ原理ですが、スリットが直線で形成されいてます。フライス盤、ボール盤、曲げ加工プレスなど高い位置決め精度が必要な工作機器には必須のパーツです。
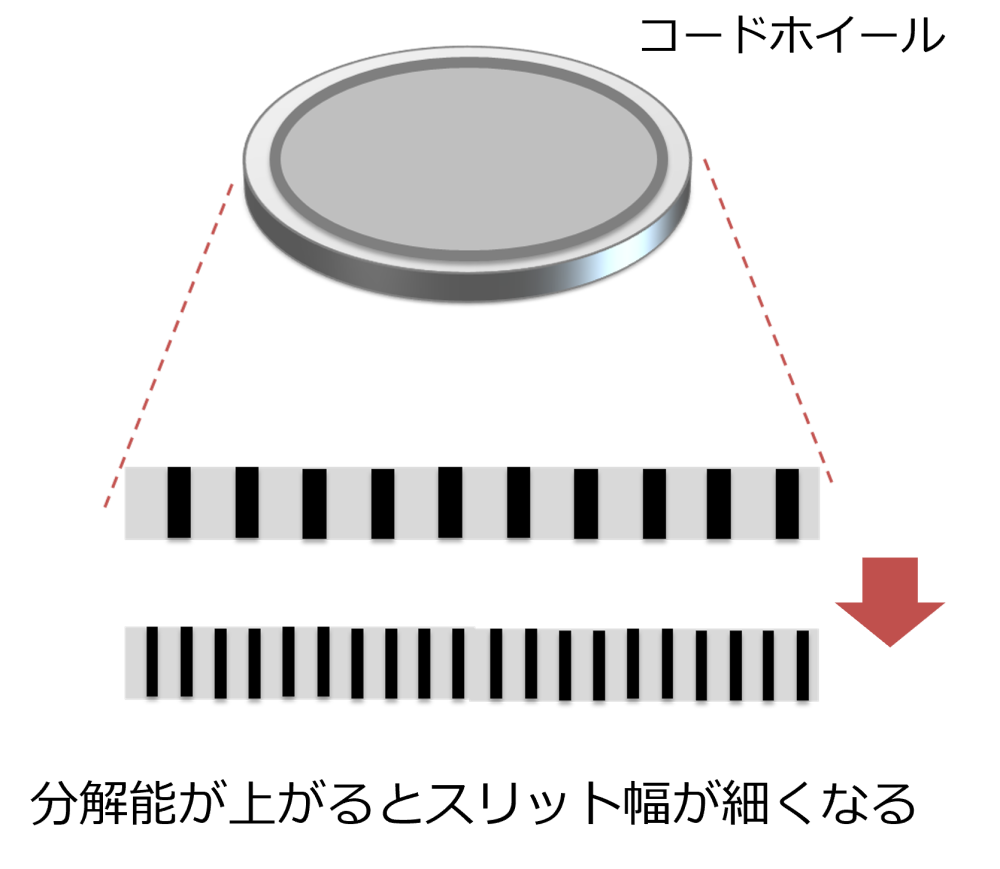
スリット加工精度が分解能を引き上げる
光学式エンコーダの性能向上の技術的アプローチの一つは、分解能の向上です。エンコーダ内部のコードホイールのスリット数を増やすことで分解能は向上しますが、同一面積当たりのスリット数を増やすことは、スリット幅自体が細くなるため、スリットを製造する為には、高い加工技術・精度が必要となります。
ご提案
小型高精度の光学式エンコーダには、高精度製作が可能なエッチング、または電鋳加工によるスリットの製作をご提案いたします。
メリット
- 加工方式を最適に選択することによりご要求の加工精度を実現いたします。
- 標準材料の在庫を持つことで、即時加工が可能でしかも低コスト。開発時間短縮を実現します。
- 国内外の高い実績。「日本で開発し製造拠点は海外で」という場合においても、当社のネットワークでグローバルに対応をいたします。